
ΠΣΘ
«Παγκόσμιο Σύστημα
Θεσιθεσίας»
Το GPS δεν είναι τίποτα άλλο παρά
μια σύγχρονη,
προχωρημένη, λεπτομερέστατη πυξίδα
με σφαιρική απόδοση σε
μορφή εικόνας
και
εξυπηρετεί για τον
ακριβή προσανατολισμό μας.
Ο προσανατολισμός
είναι ένα από τα πρώτα
στοιχεία της αντίληψης
συνεπώς και βασική
ανάγκη του ανθρώπου.
Ιστορικά
Η ανθρώπινη ανάγκη να κατευθύνεται σωστά και να βρίσκει τον προσανατολισμό της πηγάζει από τα πρώτα κι’ όλας βήματά της. Ανέκαθεν οι άνθρωποι έψαχναν για κάποιο ‘σημείο αναφοράς’ ώστε να βρουν την σωστή πορεία τους. Αρχικά βασίζονταν σε διάφορους βράχους ή δέντρα, ύστερα σημάδευαν ένα δέντρο στην πορεία τους για να βρουν και πάλι τον δρόμο της επιστροφής.

Στη συνέχεια καθώς κατακτούσε την θάλασσα και τα αγαθά της, χρησιμοποιούσε ως ‘σημείο αναφοράς’ τα διάφορα ουράνια σώματα όπως Άστρα, Σελίνι, Ήλιο.

Οι
Προγονοί του GPS
….απλός
εντοπισμός….
Σιγά σιγά προστέθηκαν τα πρώτα σύνθετα
όργανα όπως:

η πυξίδα
και
ο εξάντας
Ωστόσο ο εξάντας στην πρώιμη μορφή του είχε τη δυνατότητα
να παράσχει πληροφορίες μόνο για το γεωγραφικό πλάτος
και όχι για το γεωγραφικό μήκος,
γεγονός που αποτελούσε ένα σημαντικό μειονέκτημα, ιδιαίτερα για τους ναυτικούς.
Ύστερα στην ναυτιλία χρησιμοποιήθηκε το ‘octant’

Octant και το Ημερολόγιο
του Πλοίου
στην φρεγάτα Grand Turk
Τον 17ο
αιώνα το Ηνωμένο Βασίλειο συνέστησε ένα συμβούλιο επιστημόνων, το οποίο θα
επιβράβευε χρηματικά όποιον θα μπορούσε να εφεύρει ένα όργανο, το οποίο θα επέτρεπε τον ακριβή υπολογισμό και των δύο
γεωγραφικών συντεταγμένων, δηλαδή μήκους
και πλάτους. Έτσι επινοήθηκε το χρονόμετρο.

Χρονόμετρο
Το 1761 ο Άγγλος ωρολογοποιός Τζον Χάρισον (John Harrison), ύστερα
από προσπάθειες δώδεκα ετών, κατασκεύασε ένα όργανο, το οποίο δεν ήταν άλλο από
το γνωστό σημερινό χρονόμετρο. Σε
συνδυασμό με τον εξάντα, το χρονόμετρο επέτρεπε τον υπολογισμό του στίγματος των πλοίων με εξαιρετική ακρίβεια για τα δεδομένα της τότε εποχής.

Χρονόμετρο
….ραδιοεντοπισμός…..
Στα μέσα του 20ου αιώνα, άρχισε ο ‘ραδιοεντοπισμός’.
![]()
![]() πομπός δέκτης
πομπός δέκτης
![]()
εμβέλεια 500χλμ
Το LORAN (Long Range
Navigation – Πλοήγηση Μακράς Εμβέλειας) είναι ένα σύστημα ραδιοεντοπισμού που
τέθηκε σε λειτουργία το 1950. Η κάθε αλυσίδα
του είχε τουλάχιστον 4 πομπούς και κάλυπτε μια έκταση έως 500 χλμ. Έπρεπε λοιπόν να υπάρχουν περισσότερες
αλυσίδες για περισσότερη έκταση.

Κέντρο
Μετάδοσης του συστήματος LORAN

Χάρτης LORAN
Επίσης επιστρατεύτηκαν τα ηλεκτρομαγνητικά κύματα – γνωστά ως ραντάρ – που χρησιμοποιήθηκαν κατά κόρων στον Β’ Παγκόσμιο Πόλεμο, αλλά και σήμερα ακόμα είναι σε δράση. Όλα αυτά τα συστήματα αποτελούνται από…. τι
άλλο;;; ….. πομπούς και δέκτες. Οι πομποί είναι ένα δίκτυο σταθμών βάσεις οι δε δέκτες
είναι η πυξίδα, ο εξάντας κ.α.
Σήμερα – στην πλέον προχωρημένη τεχνολογία μας – καταλήξαμε στα
γνωστά για όλους GPS.
Γενικά
Το σύστημα GPS – στην γλώσσα μας
γνωστό ως «Παγκόσμιο Σύστημα Θεσιθεσίας» - είναι ένα σύστημα που προσδιορίζει
με ακρίβεια κάποιο σημείο. Λέγοντας
‘ακρίβεια’ εννοούμε την θέση του, την κατεύθυνση και την κίνησή του, το υψόμετρό του αλλά και
την ταχύτητά του. Εάν μάλιστα χρησιμοποιηθεί με κάποιο ειδικό
λογισμικό χαρτογράφησης, τότε μπορεί να δώσει όλες αυτές τις πληροφορίες και σε
εικόνα (σχήμα, χρώμα, μέγεθος).
Το σύστημα GPS αποτελείται από ένα
σύνολο μηχανημάτων που με την συνεργασία τους έχουν σαν τελικό αποτέλεσμα να
μπορούν να μας καθοδηγήσουν να φτάσουμε στον προορισμό μας μέσο ενός
χάρτη. Αυτό έχει επιτευχθεί βάσει ενός
πλέγματος 24ων τεχνητών δορυφόρων της Γης. Οι τεχνητοί δορυφόροι είναι σε σταθερή θέση γύρω από τον πλανήτη Γη και λειτουργούν ως πομποί οι οποίοι βοηθάνε τους
δέκτες – τα γνωστά πλέον
σε όλους «GPS» - να μας
παρέχουν το ακριβές στίγμα οποιουδήποτε σημείου ανά τον κόσμο.
….τα πρώτα βήματα…..
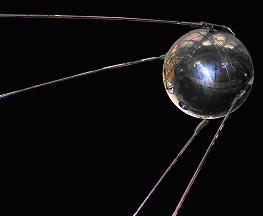
Σπουτνικ-1
Εκτοξεύτηκε
στις 04.10.1957
Η μεγάλη εξέλιξη
οφείλεται στην εκτόξευση του Σπουτνικ-1 το έτος 1957.
Οι ερευνητές του Ινστιτούτου Τεχνολογίας της Μασαχουσέτης (ΜΙΤ)
παρατήρησαν πως όσο απομακρυνόταν τόσο
χανόταν το σήμα ή το στίγμα και όσο πλησίαζε στη Γη τόσο πιο εμφανές
ήταν. Τότε κατάλαβαν πως θα μπορούσαν να έχουν λεπτομερής πληροφορίες για
οποιοδήποτε σημείο αρκεί να έβαζαν ένα σώμα (τεχνητό δορυφόρο) σε ανάλογο ύψος και μάλισα όχι μόνο ένα αλλά
τριες. Αυτό ήταν και το πρώτο βήμα για
την υλοποίηση της τεχνολογίας GPS ή ΠΣΘ.
Ένα
μήνα μετά – 04.11.1957 – εκτοξεύτηκε και το Σπουτνικ-2 μαζί με το
παγκοσμίως πλέον πασίγνωστο σκυλάκι την Λάικα.

Λάικα
04.11.1957 με Σπουτνικ-2
Έτσι λοιπόν άρχισε γύρω στην δεκαετία του ’60, όπου χρησιμοποιήθηκε
‘αποκλειστικά’ σε στρατιωτικές μονάδες και μάλιστα ήταν
στη δικαιοδοσία του Αμερικάνικου Υπουργείου Εθνικής Άμυνας. Αυτό το σύστημα ήταν γνωστό ως Transit System. Τρις δεκαετίες
αργότερα, γύρω στα μέσα το 1990,
εξελίχθηκε σε GPS. Έγινε πιο
ακριβές και άρχισε να χρησιμοποιείται από το ευρύ κοινό.
Ιστορική Αναδρομή της Δορυφορικής Εξέλιξης
Το σύστημα ξεκίνησε από το Υπουργείο Άμυνας των ΗΠΑ και
ονομάστηκε NAVSTAR GPS (Navigation
Signal Timing and Ranging Global Positioning System).
Το δορυφορικό σύστημα ρυθμίζεται καθημερινά από την Βάση
της Πολεμικής Αεροπορίας «Schriever» με κόστος περίπου 400 εκατομμύρια δολάρια
το χρόνο.
Το πρώτο δορυφορικό
σύστημα ήταν ένα σύστημα που κατασκευάστηκε από τον στρατό των ΗΠΑ μέσα στο 1960.
Οι δορυφόροι ταξίδεψαν στις καθορισμένες πορείες και μετέδωσαν τα σήματά
τους (ραδιοφωνικά) σε μια γνωστή
συχνότητα. Η λαμβανόμενη συχνότητα
διαφέρει ελαφρώς από τη συχνότητα ραδιοφωνικής μετάδοσης λόγω της μετακίνησης
του δορυφόρου όσον αφορά το δέκτη. Με
τον έλεγχο αυτής της μετατόπισης συχνότητας πέρα από ένα σύντομο χρονικό
διάστημα, ο δέκτης μπορεί να καθορίσει τη θέση του στην μια ή στην άλλη πλευρά
του δορυφόρου. Διάφορες τέτοιες
μετρήσεις συνδυάζονται με μια ακριβή γνώση της τροχιάς του δορυφόρου και
μπορούν να καθορίσουν μια ιδιαίτερη θέση.
Παράλληλα με το GPS, η πρώην
Σοβιετική Ένωση προχώρησε στη δημιουργία
ενός παρόμοιου συστήματος
προσδιορισμού θέσης με την ονομασία GLONASS. Αρχικά,
ο χαρακτήρας του συστήματος GLONASS ήταν και
πάλι στρατιωτικός (αντίστοιχος με το GPS) και κάλυπτε τις ανάγκες της Πρώην
Σοβιετικής Ένωσης και των συμμαχικών αυτής χωρών. Ύστερα,
με τη διάλυση της Σοβιετικής Ένωσης και τις αλλαγές σε πολιτικό επίπεδο, η
χρήση του συστήματος GLONASS άρχισε να
επεκτείνεται και έξω από τα σύνορα της Σοβιετικής Ένωσης. Τα τελευταία χρόνια έχει γίνει μια σημαντική
προσπάθεια για την συνεργασία των
συστημάτων GPS και GLONASS, η οποία
δίνει μεγαλύτερη κάλυψη στην επιφάνεια της γης για τους χρήστες των συστημάτων
αυτών και μεγαλύτερο πλήθος παρατηρούμενων δορυφόρων.
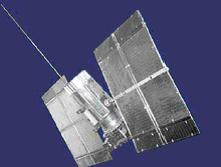
Δορυφόρος του
συστήματος GLONASS
Λειτουργικά
Τμήματα
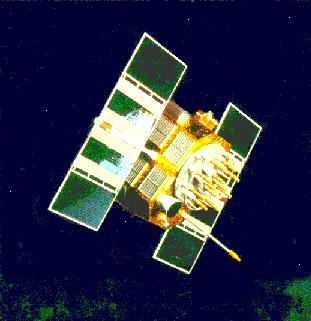
GPS Satellite
Δορυφόρος ΠΣΘ
Το σύστημα εντοπισμού θέσης GPS σχηματίζει ένα παγκόσμιο
δίκτυο, με εμβέλεια που καλύπτει:
Ø Ξηρά,
Ø Θάλασσα και
Ø
Αέρα.
Ο διαχωρισμός του δικτύου σε επιμέρους τμήματα είναι απαραίτητος. Μ’ αυτόν τον τρόπο πραγματοποιούνται όλες οι λειτουργίες του δικτύου αλλά και ο συντονισμός του.
Τα τμήματά του είναι:
Ø
Το Διαστημικό Τμήμα
Ø
Το Επίγειο Τμήμα Ελέγχου
Ø
Το Τμήμα Τελικού Χρήστη.
…..το Διαστημικό Τμήμα….
Αποτελείται από το δίκτυο 24 δορυφόρων που ήδη αναφέραμε. Οι δορυφόροι αυτοί «σκεπάζουν» ομοιόμορφα,
με το σήμα τους, ολόκληρο τον πλανήτη.
Συγκεκριμένα, ο πρώτος δορυφόρος που
εκτοξεύθηκε για χρήση GPS ήταν το 1978.
Από το 1989 έως και το 1993 εκτοξεύθηκαν άλλοι δέκα δορυφόροι με το όνομα Block 1. Το
1994 οι δορυφόροι έγιναν 24 ενώ
σήμερα έχουμε καταφέρει να αυξήσουμε τον αριθμό τους σε 28 για να αντικαταστήσουν
τους παλιούς που έχουν υποστεί φθορές.
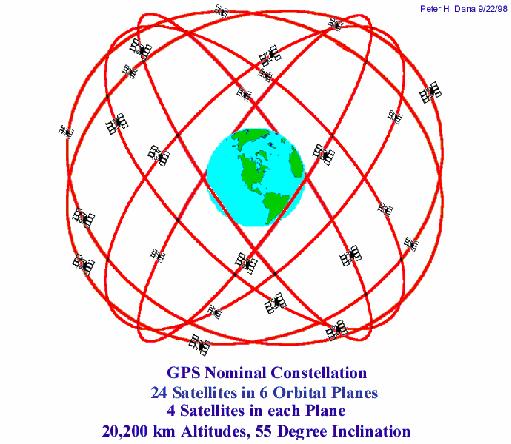
Εικονικό Σύμπλεγμα GPS
24 Δορυφόροι σε 6 Τροχιακές Διευθύνσεις
4 Δορυφόροι σε κάθε Τροχιά
20,200 χλμ Ύψος, 55 μοίρες Κλίση
Όλοι οι δορυφόροι βρίσκονται σε ύψος περίπου 20.438,67
χλμ. πάνω από την επιφάνεια της θάλασσας και εκτελούν δύο περιστροφές γύρω από τη Γη κάθε 24ωρο.
Η κατασκευάστρια εταιρεία είναι η Rockwell International,
η εκτόξευσή τους πραγματοποιήθηκε
από το ακρωτήριο Canaveral (στην Florida των ΗΠΑ), ενώ η τροφοδοσία τους με ηλεκτρική ενέργεια πραγματοποιείται μέσω των ηλιακών στοιχείων που διαθέτουν.

Ø
Επίγειο τμήμα ελέγχου:
1 επανδρωμένο κέντρο και
4 μη-επανδρωμένα κέντρα.
….το
Επίγειο Τμήμα….
Οι δορυφόροι, όπως είναι αναμενόμενο,
είναι πολύ πιθανό να αντιμετωπίσουν ανά πάσα στιγμή προβλήματα στη σωστή
λειτουργία τους. Οι έλεγχοι που πραγματοποιούνται σε αυτούς αφορούν
στη σωστή τους ταχύτητα και υψόμετρο και στην κατάσταση της επάρκειάς τους σε
ηλεκτρική ενέργεια. Παράλληλα,
εφαρμόζονται όλες οι διορθωτικές
ενέργειες.
Αυτά τα κέντρα είναι
εγκατεστημένα σε ισάριθμες περιοχές του πλανήτη:
α) Κολοράντο (Ηνωμένες Πολιτείες της Αμερικής) το μοναδικό κέντρο στην ξηρά και επανδρωμένο. Φροντίζει για την σωστή λειτουργία των
υπολοίπων 4ων και τον συντονισμό τους.
β) Χαβάη (Ανατολικός
Ειρηνικός Ωκεανός)
γ) Ascension Island (Ατλαντικός
Ωκεανός)
δ) Diego Garcia (Ινδικός
Ωκεανός)
ε) Kwajalein (Δυτικός
Ειρηνικός Ωκεανός)
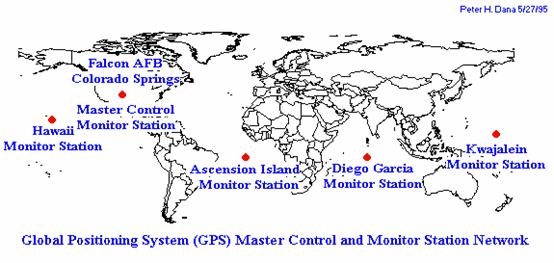 Δίκτυο παρακολούθησης και Έλεγχος GPS
Δίκτυο παρακολούθησης και Έλεγχος GPS
Σημείωση: η διάταξη τους δεν είναι τυχαία αλλά ακολουθεί μια παράλληλη γραμμή
….το
Τμήμα Τελικού Χρήστη….
Είναι οι χιλιάδες GPS δέκτες ανά τον
κόσμο. Αυτοί οι δέκτες μπορεί να είναι
σε οποιοδήποτε
τροχοφόρο, σε πλεούμενο ή σε ιπτάμενο
μέσο. Μάλιστα σε συνδυασμό με ένα
ειδικό λογισμικό - το οποίο προβάλει ένα χάρτη στην οθόνη του GPS - δίνει
στον χρήστη μια πολύ καθαρή και λεπτομερή εικόνα σχετικά με την γεωγραφική του
θέση.
![]()
![]()
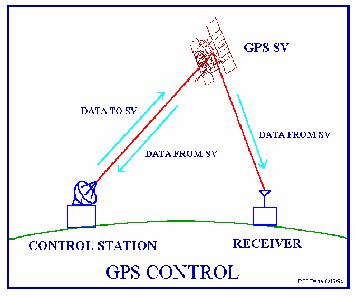
![]() Σταθμός Ελέγχου Δέκτης
Σταθμός Ελέγχου Δέκτης
Πορεία Τροχιάς
 Δορυφόρος στη
2η φορά
Δορυφόρος στη
2η φορά
![]()
![]() Δορυφόρος στην 1η φορά
Δορυφόρος στην 1η φορά
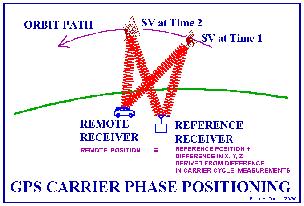
Απομακρυσμένος Δέκτης Δέκτης Αναφοράς
Θέση
= Θέση Αναφοράς +
Διαφορά
σε Χ Υ Ζ (Συντεταγμένες Θέσεις)
Παραγόμενες
από τη διαφορά
σε
Μετρήσεις Κύκλων Φορέα.
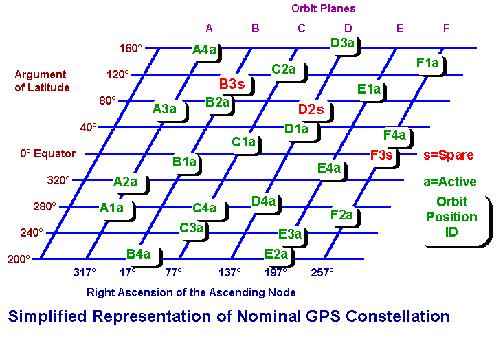
Η σωστή άνοδος του ανερχόμενου
κόμβου
Απλοποιημένη
παρουσίαση του Εικονικού Συμπλέγματος του GPS
ABCDEF οι 6 δορυφορικές τροχιές
s = ανταλλακτικό / εφεδρικό
a = ενεργό
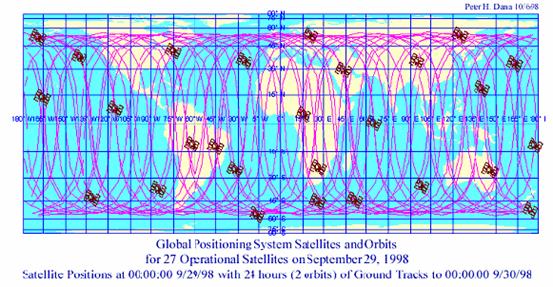
Δορυφόροι και Τροχιές του GPS
Για 27 Δορυφόρους σε χρήση στις 29
Σεπτεμβρίου 1998
Θέσεις Δορυφόρων στης 00:00:00
29.09.1998 με εδαφική απεικόνιση κατά τη διάρκεια 24ώρου (2 τροχιές) έως
00:00:00 30.09.1998
Συνεργασία
Δορυφόρου
– Δέκτη
Όλοι έχουμε παρατηρήσει κατά τη
διάρκεια μιας καταιγίδας, ότι πρώτα βλέπουμε τη
λάμψη της αστραπής και με μια καθυστέρηση ακούμε τον ήχο
της βροντής. Αυτό συμβαίνει διότι τα ηχητικά κύματα
ταξιδεύουν με μικρότερη ταχύτητα από τα κύματα του φωτός. Παραδεχόμαστε λοιπόν ότι το κύμα του φωτός
φτάνει σε εμάς άμεσα σε σχέση με το ηχητικό.
Μπορούμε λοιπόν να υπολογίσουμε την απόστασή μας από την καταιγίδα,
μετρώντας τη χρονική καθυστέρηση μεταξύ των δύο ερεθισμάτων - της αστραπής και
της βροντής - εάν πολλαπλασιάσουμε αυτή τη χρονική καθυστέρηση με την ταχύτητα του ήχου. Η ταχύτητα
μετάδοσης του ήχου στον αέρα είναι 344 m/sec. Επομένως, αν μεσολαβήσουν 2
δευτερόλεπτα από τη στιγμή που βλέπουμε την αστραπή έως την στιγμή που ακούμε
τη βροντή, τότε η καταιγίδα βρίσκεται σε 688 μέτρα μακριά από εμάς:
2 x 344 = 688
μέτρα
Όμως με το σύστημα GPS, μπορούν να γίνου διάφορες
μετρήσεις συγχρόνως σε διάφορους
δορυφόρους, επιτρέποντας με μια συνεχή αποτύπωση στον δέκτη και να παραχθούν
στον πραγματικό χρόνο. Κάθε απόσταση μέτρησης, ανεξάρτητα από το
σύστημα που χρησιμοποιείται, τοποθετεί το δέκτη σε μια σφαιρική θέση σε
συγκεκριμένη απόσταση από τον εκφωνητή.
Με τη λήψη διάφορων τέτοιων μετρήσεων και την έρευνα ενός σημείου όπου
συναντιούνται, παράγεται μια αποτύπωση.
Εντούτοις, στην περίπτωση των γρήγορων δεκτών, η θέση του σήματος
κινείται όπως τα σήματα παραλαμβάνονται από διάφορους δορυφόρους. Επιπλέον, τα ραδιοκύματα παρουσιάζουν επιβράδυνση καθώς περνούν μέσω της
ιονόσφαιρας, αυτή η επιβράδυνση ποικίλλει ανάλογα με τη γωνία του δέκτη στο
δορυφόρο, επειδή αλλάζει η απόσταση μέσω της ιονόσφαιρας.
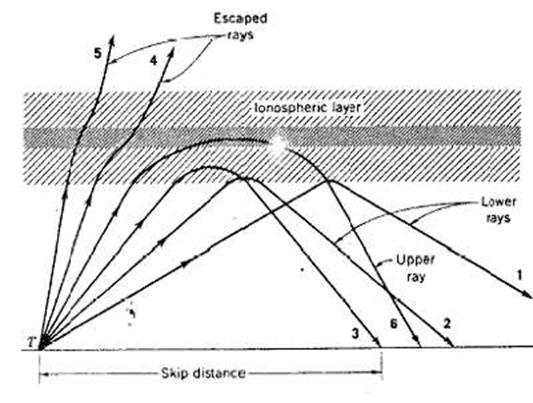
Επίδραση της
ιονόσφαιρας σε κύματα τα οποία εκπέμπονται με διαφορετικές γωνίες.
Ο βασικός υπολογισμός προσπαθεί έτσι να βρει την πιο
σύντομη κατεύθυνση της εφαπτομένης γωνίας στους τέσσερις πόλους που τοποθετούνται
σε τέσσερις δορυφόρους. Οι δορυφορικοί
δέκτες πλοήγησης μειώνουν τα λάθη με τη χρησιμοποίηση των συνδυασμών σημάτων
από τους πολλαπλάσιους δορυφόρους και έπειτα τη χρησιμοποίηση των τεχνικών όπως
το φιλτράρισμα Kalman (Rudolf E. Kalman – Μαθηματικός
– γεννήθηκε στην Ουγγαρία το έτος 1930) για να περιοριστεί ο θόρυβος.
Τρόπος
Λειτουργίας του Συστήματος Πλοήγησης (GPS)
Συνοπτικά, το GPS είναι ένα δορυφορικό
σύστημα προσδιορισμού θέσης (3-Δ), χρόνου και ταχύτητας για ακίνητο και
κινούμενο δέκτη σε πολύ μικρό χρονικό διάστημα (από μερικά δευτερόλεπτα
μέχρι λίγες ώρες ανάλογα με το είδος των εφαρμογών) παραβλέποντας κλασικές
επίγειες τεχνικές που εφαρμόζονται όπως ο τριγωνισμός, ο τριπλευρισμός ή
συνήθως ο συνδυασμός αυτών των δυο μεθόδων, που παρέχουν τις επιφανειακές
ελλειψοειδείς συντεταγμένες και η
υψομετρία, που παρέχει την τρίτη παράμετρο, τα υψόμετρα. Βασίζεται στις αρχές λειτουργίας των
παθητικών δορυφορικών συστημάτων και εξασφαλίζει συνεχή, παγκόσμια πλοήγηση
ανεξάρτητα από τις καιρικές συνθήκες σε απεριόριστο αριθμό χρηστών.
Η βασική αρχή
στην οποία στηρίζεται είναι ο προσδιορισμός θέσης με την μέτρηση 4
‘’συντεταγμένων’’ μεταξύ του παρατηρητή και του δορυφόρου. Για αυτό η σχεδίαση των τροχιών των δορυφόρων
έγινε με τέτοιο τρόπο ώστε να είναι δυνατή η παρατήρηση 4 τουλάχιστον δορυφόρων
από οποιοδήποτε σημείο της γης για κάθε στιγμή.
Για τον προσδιορισμό της θέσης ενός σημείου στο χώρο αρκούν οι μετρήσεις
των αποστάσεων από τρία σημεία γνωστών συντεταγμένων. Βέβαια θα αρκούσαν και τρεις δορυφόροι για
τον προσδιορισμό της θέσης ενός σημείου στο σύστημα αναφοράς των
δορυφόρων. Ο λόγος που απαιτούνται
τουλάχιστον τέσσερις δορυφόροι (αποστάσεις) είναι για να προσδιορίσουμε τη διάφορα ανάμεσα στην ένδειξη του
χρονομέτρου του χρήστη και την ένδειξη του χρονομέτρου του δορυφόρου δηλαδή
την καθυστέρηση του χρονομέτρου του
δέκτη σε σχέση με το χρόνο αναφοράς του GPS.
Ακριβώς γι’ αυτό το λόγω της ύπαρξης αυτού του σφάλματος χρησιμοποιούμε
τον επιστημονικό όρο ψευδοαπόσταση. Ο χρόνος αναφοράς του GPS έχει έναρξη την
00.00 UTC της 5ης Ιαν. 1980. Η
προσδιοριζόμενη θέση (Χ,Υ,Ζ)
αναφέρεται στον Παγκόσμιο Γεωκεντρικό
Σύστημα Αναφοράς 1984, γνωστό ως WGS
84 (Παγκόσμιο Γεωδαιτικό Σύστημα 1984 = World Geodetic System 1984). Το
σήμα που εκπέμπει κάθε δορυφόρος είναι ‘’μοναδικό’’ και εξαιρετικά σύνθετο και
βασίζεται σε δυο φέρουσες συχνότητες στην περιοχή του φάσματος των
μικροκυμάτων.
L1 = 154 x 10.23 = 1575.42 ΜΗz &
L2 = 120 x 10.23 = 1227.60 MHz,
πολλαπλάσιες της βασικής συχνότητας
των 10.23 ΜΗz.
Γενικότερα, για την απαλοιφή συστηματικών σφαλμάτων
χρησιμοποιούνται στην επεξεργασία πέραν των δύο συχνοτήτων διάφοροι γραμμικοί
συνδυασμοί τους όπως η L3 για εξάλειψη του φαινομένου της ιονοσφαιρικής
διάθλασης για καλύτερη απόδοση.
Το σήμα παράγεται από την σύνθεση δυο κωδικών μοναδικών
για κάθε δορυφόρο, του C/A (coarse/acquisition) που προστίθεται μόνον στον
φορέα (συχνότητα) L1 και του P (precision = ακρίβεια), που διαμορφώνεται και
στις δυο συχνότητες L1, L2. Οι κώδικες καλούνται και ψευδοτυχαίοι εξαιτίας του
γεγονότος ότι με τη βοήθεια αυτών είναι δυνατή η μέτρηση των ψευδοαποστάσεων
που προαναφέραμε. Ο δέκτης (ή αλλιώς
μηχάνημα πλοήγησης) δέχεται το σήμα, συγκρίνει τον λαμβανόμενο κώδικα με ένα
αντίγραφο που παράγει ο ίδιος και τελικά ταυτίζει το σήμα και ο χρόνος
διαδρομής του σήματος πολλαπλασιαζόμενος με την ταχύτητα του φωτός c μας δίνει την απόσταση μεταξύ δέκτη
και δορυφόρου. Αυτή η απόσταση είναι η
ψευδοαπόσταση και δεν περιλαμβάνει την χρονική ολίσθηση μεταξύ χρονομέτρων
δέκτη και δορυφόρου, η οποία προστίθεται σαν επιπλέον άγνωστος στην τελική
εξίσωση υπολογισμού.
Παρακάτω, φαίνονται αίτια που μπορούν να προκαλέσουν
σφάλματα σε ότι αφορά στην θέση του δέκτη και το μέγεθος του σφάλματος σε
μέτρα.
Ø
Αίτιο - (Σφάλμα σε μέτρα)
Ø
Ιονοσφαιρικη επίδραση (+ - 5μ.)
Ø
Σφάλμα δορυφορικού ρολογιού (+ -
2μ.)
Ø
Τροποσφαιρικη επίδραση (+ -
0,5μ.)
Ø
Αριθμητικά λάθη σε υπολογισμούς
(+ - 1μ.)
Ø
Λάθη λόγο αστρονομικού
ημερολογίου (+ - 2,5μ.)
Ø
Εμπόδια (κτήρια, φαράγγια, τοίχοι
κλπ) (+ - 1μ.)
Οι μετρήσεις
με δορυφορικό σύστημα εντοπισμού διακρίνονται σε δυο βασικές κατηγόριες:
- σε μετρήσεις ψευδοποαστάσεων και
- σε μετρήσεις φάσεων (ακριβέστερες μετρήσεις).
Στις μετρήσεις φάσεων μετριέται η διαφορά φάσης του σήματος του δορυφόρου
την στιγμή εκπομπής με την φάση του σήματος του δέκτη τη στιγμή της λήψης.
Η διαφορά φάσης, σε κύκλους πολλαπλασιαζόμενη με το μήκος κύματος και
μετατρέπεται σε απόσταση. Τη στιγμή της
λήψης ο δέκτης μετράει μόνο το κλασματικό μέρος της φάσης μιας και δε μπορεί να
μετρήσει και τον ακέραιο αριθμό κύκλων που αντιστοιχεί στην απόσταση
δορυφόρου-δέκτη. Επομένως, οι μετρήσεις
φάσης παρουσιάζουν το πρόβλημα της αβεβαιότητας στον προσδιορισμό αυτού του
ακέραιου αριθμού Ν, κάτι το οποίο λύνει με συγκεκριμένο αλγόριθμο ο κάθε δέκτης
στην έναρξη των μετρήσεων.
Στην περίπτωση
αδυναμίας λήψης του σήματος χάνεται ένας αριθμός ακέραιων κύκλων με συνέπεια
όλες οι επόμενες μετρήσεις να είναι μετατοπισμένες κατά τον ίδιο αριθμό
κύκλων. Το πρόβλημα αυτό (ολίσθηση
κύκλων) αντιμετωπίζεται όπως και η ασάφεια των ακέραιων κύκλων από το δέκτη
κατά την προεπεξεργασία. Ο συνδυασμός μετρήσεων φάσης και κώδικα
θεωρείται ο ιδανικότερος για τον εντοπισμό της ολίσθησης των κύκλων.
Μέθοδος
Προσδιορισμού Θέσης
Σχετικός
κινηματικός προσδιορισμός
RTK (Real Time Kinematic)
Η μέθοδος RTK είναι κινηματικός προσδιορισμός, στην οποία
χρησιμοποιούνται δύο δέκτες (base –
rover) L1/L2, και είναι η μοναδική που
μπορεί να δώσει αποτελέσματα καθώς και πληροφορίες για την ποιότητα της λύσης σε πραγματικό χρόνο. Για τη
λειτουργία της μεθόδου, απαιτείται επικοινωνία μεταξύ των δεκτών, η οποία
πραγματοποιείται είτε με κάποιο UHF modem είτε με κάποιο GSM/GPRS modem. Ο κινητός δέκτης λαμβάνει συνεχώς διορθώσεις
από τη βάση και τις χρησιμοποιεί για να επιλύσει εν κινήσει τις ασάφειες φάσης
(On The Fly). Πλέον, ο χρήστης μπορεί να
αποτυπώνει σε περιοχές περιορισμένης ορατότητας σε δορυφόρους (φυσικά ή τεχνητά
εμπόδια) χωρίς να χάνεται χρόνος για επανέναρξη. Η ακρίβεια
της συγκεκριμένης μεθόδου είναι της
τάξης του εκατοστού και ο χρόνος που χρειάζεται είναι περίπου ένα δευτερόλεπτο.
Τα δορυφορικά συστήματα επιτρέπουν στις μικρές
ηλεκτρονικές συσκευές να καθορίσουν θέσεις (γεωγραφικό μήκος, γεωγραφικό πλάτος
και ύψος) μέσα σε μερικά μέτρα χρησιμοποιώντας τα χρονικά σήματα που
μεταδίδονται με ραδιοσυχνότητες από τους δορυφόρους. Οι δέκτες στο έδαφος, σε σταθερή θέση βέβαια,
μπορούν να χρησιμοποιηθούν και για επιστημονικά πειράματα που χρειάζεται
ορισμός θέσεως.
Για να έχουμε έναν πλοηγό, π.χ. στο αυτοκίνητο, αρκεί να εφοδιαστούμε με μια κατάλληλη συσκευή η οποία
να έχει ενσωματωμένο GPS. Τελευταία, πολλοί κατασκευαστές αυτοκινήτων τοποθετούν στην κεντρική κονσόλα του
αυτοκινήτου μια οθόνη, η οποία εκτός από τις λειτουργίες που αφορούν στο
αυτοκίνητο (ραδιόφωνο, κατανάλωση, υπόλοιπο ταξιδιού κτλ.), μπορεί να
μετατραπεί και σε πλοηγός. Για να γίνει
βέβαια αυτό, πρέπει ο κατασκευαστής να έχει εφοδιάσει το όχημα με τον
απαραίτητο εξοπλισμό (GPS μονάδα,
κεραία, κλπ). Το μόνο που πρέπει να κάνει ο οδηγός, είναι να τοποθετήσει με κάποιον
τρόπο (συνήθως CD) τους χάρτες
που τον αφορούν. Αν ο
κατασκευαστής δεν έχει εξοπλίσει με κάτι τέτοιο το αυτοκίνητο, ο οδηγός θα
πρέπει να εφοδιαστεί με μια συσκευή-πλοηγό (φορητός υπολογιστής τσέπης - pocket
pc -, ένα ρολόι ως και ένα κινητό τηλέφωνο), και να το τοποθετήσει σε κάποιο
βολικό, για την παρακολούθησή του, σημείο στο εσωτερικό του αυτοκινήτου ώστε να
καθοδηγείται από αυτό. Το πλεονέκτημα
του μηχανήματος αυτού είναι ότι με το να είναι φορητό, εκτός από το αυτοκίνητο,
μπορεί να χρησιμοποιηθεί από τον κάτοχο του και αλλού, όπως σε ένα σκάφος, σε
δεύτερο αυτοκίνητο, στο σπίτι (εάν είναι υπολογιστής) κτλ.
Χρονικό της εξέλιξης
των GPS
Ø
Τέλη 10ετίας του 1960:
Αναπτύχθηκε
η ιδέα για GPS
Ø
Αρχές 10ετίας του 1970:
Χρηματοδοτήθηκε
το πρόγραμμα GPS και ιδρύθηκε το Ειδικό Γραφείο εντός του Υπουργείου Αμύνης των
ΗΠΑ.
Ø
Δεκέμβριος 1973:
εγκρίθηκε
το GPS από το Σύστημα Άμυνας
Ø
Μέσα 10ετίας 1970:
διεξάγονται
δοκιμές στη Γη.
Ø
22 Φεβρουαρίου 1978:
εκτοξεύτηκε ο πρώτος δορυφόρος για GPS.
Ø
1986 – 1989:
το GPS
πρόγραμμα μπήκε στην άκρη εξ’ αιτίας της καταστροφής του διαστημικού λεωφορείου
«Challenger».
Ø
1989:
το πρόγραμμα εκτόξευσης ανανεώθηκε. Έγιναν αλλαγές
στο σχέδιο του δορυφορικού συμπλέγματος.
Ø
1989:
ο Συνεταιρισμός Μάγγελαν συστήνει
τους πρώτους δέκτες χειρός του GPS.
Ø
Ιανουάριος 1990:
εκδόθηκε
για πρώτη φορά το GPS World και δημοσιεύτηκε.
Ø
1991:
προσδιορίζεται
μια αρκετά σημαντική δυσλειτουργία που καθυστερούσε την πρόοδο και
ρυθμίστηκε/διορθώθηκε.
Ø
Δεκέμβριος 1993:
Γίνεται η
Δήλωση Αρχικής Λειτουργικής Δυνατότητας από τον Υπουργό Άμυνας των Η.Π.Α.
Ø
02 Μαΐου, 2000:
Χωρίζεται
με προεδρική διαταγή η επιλεκτική διαθεσιμότητα. Αυξάνεται η οριζόντια ακρίβεια στους φθηνούς
αστικούς δέκτες GPS από 100 μέτρα σε 15-25 μέτρα.
Χ ρ
ή σ η
Η χρήση του GPS είναι πολύτιμη και πολύπλευρη.
Σχεδόν όλοι σήμερα κινούνται με το GPS ή με τον απλό
δέκτη GPS (π.χ. αυτοκίνητο) ή σε συνδυασμό με άλλα συστήματα (π.χ. VeCoN, ESTB
κ.α. Το GIS (Geographical Information
System) είναι η βάση δεδομένων του GPS.
Μέσο του GIS μπορούμε να επεξεργαστούμε τα δεδομένα που βρίσκονται σε
χάρτες ηλεκτρονικής μορφής.
Είναι πλέον καθημερινή συνήθεια να κινούνται με
ηλεκτρονικό πλοηγό - με την βοήθεια του GPS - αυτοκίνητα, πλοία, τρένα,
αεροπλάνα, ακόμα και για ασφαλή ορειβασία.
Είναι τόσα πάρα πολλά τα οφέλη που εδώ θα αναλύσουμε μόνο μερικά.





…..για ασφαλή οδήγηση αυτοκινήτου
με αυτόματη πλοήγηση……

Η οδήγηση είναι ασφαλέστατη
χρησιμοποιώντας τα συστήματα αυτόματης πλοήγησης (sat nav) αρκεί να μην
μεταθέσουμε τα δικά μας καθήκοντα σε τέτοια συστήματα. Αν υπερεκτιμήσουμε το GPS τότε ίσως έχουμε
δυσάρεστα αποτελέσματα. Σαν οδηγοί
πρέπει πάντα να είμαστε προσεκτικοί και να θυμόμαστε πως τα GPS είναι για να κατευθύνουν κι’ όχι να οδηγούν.
Η
ΕΛΠΑ, σε συνεργασία με τις υπόλοιπες αυτοκινητιστικές λέσχες της Ευρώπης,
υπενθυμίζει και συμβουλεύει τα εξής:
1. Εσείς είστε ο οδηγός - όχι το σύστημα!
Η ευθύνη είναι του οδηγού και όχι του
συστήματος.
2. Δίνετε προτεραιότητα σε ότι βλέπετε εσείς, όχι σε ότι
«βλέπει» το σύστημα!
Σε πολλές περιπτώσεις τα συστήματα
οδηγούν σε αδιέξοδο, σε… ποτάμια, γραμμές τρένου κ.α.
3. Μόνο εσείς γνωρίζετε τι οδηγείτε, όχι το σύστημα!
Το μέγεθος του οχήματος που οδηγείται (Ι.Χ., φορτηγό κλπ) το
γνωρίζετε εσείς και όχι το σύστημα.
Επίσης τη σήμανση στο οδόστρωμα πρέπει να το παρατηρείτε εσείς.
4. Παρακολουθείτε προσεκτικά το δρόμο, όχι το σύστημα!
Το σύστημα σας παρέχει περισσότερες
πληροφορίες απ’ όχι χρειάζεστε.
5. Τοποθετείστε το σύστημα σε σημείο που να μην εμποδίζει!
Δεν πρέπει να αποσπά την προσοχή σας,
ούτε να δημιουργεί «νεκρές γωνίες».
Πρέπει επίσης να είναι σωστά τοποθετημένο, ώστε σε περίπτωση ξαφνικού
φρεναρίσματος ή ατυχήματος, να μην τραυματίσει κάποιον.
6. Μην επιχειρείτε να προγραμματίσετε το σύστημα ενώ…
οδηγείτε!
Διότι τα μάτια σας, το μυαλό σας και
τα χέρια σας είναι… εκτός οδήγησης! Σταματήστε στην άκρη του δρόμου με
ασφάλεια.
7. Χρησιμοποιείστε όλες τις δυνατότητες του συστήματος!
Η φωνητικές οδηγίες είναι πολύ πρακτικές γιατί δεν αποσπάται
η προσοχή του οδηγού από το δρόμο!
8. Ελέγξτε τη διαδρομή σας, πριν ξεκινήσετε!
Οι σωστές
οδηγίες στο σύστημα πλοήγησης οδηγούν και σε σωστό προορισμό.
9. Αναβαθμίζετε τακτικά το σύστημά σας!
Έτσι θα είναι διαρκώς ενημερωμένο στις τελευταίες εξελίξεις της
κυκλοφορίας, για νέους δρόμους κ.α.
10.
Προσοχή στους κλέφτες!
Αν το σύστημα αποσπάται, μην το αφήνετε μέσα στο
αυτοκίνητο! Οι κλέφτες βλέπουν τα «σημάδια» της εγκατάστασης και... επιχειρούν
την αφαίρεσή του, με σημαντικές επιπτώσεις.

Η
Λειτουργία του Δέκτη
Η λειτουργία
ενός συστήματος πλοήγησης αυτοκινήτου έχει ως εξής :
Ø
Άνοιγμα της
συσκευής - και αν είναι υπολογιστής τσέπης επιλογή του προγράμματος πλοήγησης
που έχουμε εφοδιαστεί.
Ø
Αναμονή για την λήψη
σήματος μέσω δορυφόρου.
Ø
Επιλογή
προορισμού με εισαγωγή οδού, είτε με καθορισμό ενός σημείου στο
χάρτη.
Ø
Επιλογή του τρόπου
μετάβασης (συντομότερο σε χλμ., ή μέσω κεντρικών οδών).
Ø
Αναμονή για τον υπολογισμό
της επιλεγμένης διαδρομής.
Ø
Η Επιλογή της διαδρομής εμφανίζεται στην οθόνη και καθοδηγεί τον οδηγό καθ' όλη την πορεία
μέχρι τον τελικό προορισμό, δίνοντας
σχηματικές και φωνητικές κατευθύνσεις
για την πορεία. Η πορεία που έχει
επιλεγεί είναι μαρκαρισμένη στο χάρτη με διαφορετικό χρωματισμό, ώστε να μπορεί
να βλέπει ο χρήστης της συσκευής όλη την διαδρομή που θα διανύσει.
Σε όλη τη
διαδρομή επίσης μπορεί να παίρνει πληροφορίες
για την απόσταση και το χρόνο μέχρι τον προορισμό, την ταχύτητα την οποία κινείται το όχημα, καθώς και το υψόμετρο που βρίσκεται .
Άλλες δυνατότητες ενός δέκτη
Τα περισσότερα συστήματα πλοήγησης συνδυάζουν την λειτουργικότητα με τη διασκέδαση. Με έναν τέτοιο δέκτη, μπορεί κανείς να
παρακολουθεί ταινίες και βίντεο κλιπ, να ακούει τραγούδια , να συνδέεται στο
Internet , ως και να βλέπει κανάλια στην TV.
Επίσης σημαντικό είναι να τονίσουμε ότι ανάλογα με το πρόγραμμα
πλοήγησης που έχουμε επιλέξει για τη συσκευή μας, μπορούμε να το ενημερώσουμε με διάφορα extras που προσφέρονται από
το
πρόγραμμα, που κάνουν την ζωή μας πιο εύκολη. Τέτοια είναι διάφορα σημεία ενδιαφέροντος ανά
περιοχές, επικίνδυνα σημεία δρόμων, διάφορα καταστήματα, κέντρα διασκέδασης,
τράπεζες, βενζινάδικα, ξενοδοχεία, σχολεία, αθλητικά κέντρα, δημόσιες υπηρεσίες
και πολλά άλλα ανάλογα με το πρόγραμμα και τις δυνατότητες του.
Πως μπορεί κάνεις να επιλέξει την
κατάλληλη συσκευή για το αυτοκίνητό του
Για να επιλέξει κανείς τον κατάλληλο δέκτη, αν δεν είναι
εφοδιασμένο το αυτοκίνητό του, εξ αρχής, θα πρέπει αρχικά να έχει αποφασίσει τι ακριβώς θέλει να κάνει με την
συγκεκριμένη συσκευή εκτός από την χρήση του σαν πλοηγό (π.χ κινητό,
υπολογιστή, κτλ). Στη συνέχεια το κόστος της κάθε συσκευής είναι κάτι
σημαντικό και επηρεάζει τον καθένα. Όλα
τα μηχανήματα αυτού του είδους συνοδεύονται με μια βάση η οποία τοποθετηθείτε
στο αυτοκίνητο σε κάποιο ορατό για τον οδηγό σημείο, χωρίς όμως να τον
εμποδίζει κατά την οδήγηση. Αυτό
σημαίνει ότι θα πρέπει να έχει λάβει κάνεις υπ' όψιν του τον χώρο που του
παρέχεται και το μέγεθος της συσκευής.
Τέλος το πιο σημαντικό στο όλο σύστημα είναι το πρόγραμμα
που θα εφοδιαστεί το μηχάνημα. Το πρόγραμμα πλοήγησης θα πρέπει να
καλύπτει τις απαιτήσεις του χρήστη σε ότι αφορά στην χρήση του, να είναι
εφοδιασμένο με τους κατάλληλους, ενημερωμένους
χάρτες, καθώς και να υποστηρίζεται με αναβαθμίσεις
(συνήθως μέσω διαδικτύου) για να μπορεί πάντα να δίνει σωστές πληροφορίες. Επίσης στις αναβαθμίσεις συμπεριλαμβάνονται
και όσες αφορούν στα extras που θα
έχουν τοποθετηθεί στο δέκτη, γιατί κι’ αυτά χρειάζονται μια συχνή ενημέρωση.
….σε
συνδυασμό με το σύστημα VeCoN….
VeCoN (Vehicle Control and Navigation -
πρώην GEOTRASIM), Ενα Γεωπληροφοριακο Συστημα Πραγματικου Χρόνου για την
Προσομοίωση της Αστικής Κυκλοφορίας
Ακόμα μία σημαντική και πολύ
αποτελεσματική χρήση του GPS είναι ο συνδυασμός του με το σύστημα VECON (VΕhicle
CΟntrol and Navigation) - πρώην
GEOTRASIM. Οι αποδέκτες αυτού είναι οχήματα όπως σε διάφορες επιχειρήσεις, της Αστυνομίας, Ιδιωτικές
εταιρείες Security, Ασθενοφόρα (ΕΚΑΒ ή ιδιωτικά), Πυροσβεστική, η Οδική
Βοήθεια, Courier (π.χ. Express Service) κ.α.
Διάφορα συστήματα προηγμένης τεχνολογίας
επιστρατεύτηκαν γι’ αυτήν την επίτευξη π.χ.:
Ø
GPS (Παγκόσμιο
Σύστημα Θεσιθεσίας)
Ø
GIS (Γεωγραφικά
Συστήματα Πληροφοριών)
Ø
Δυναμικά Μοντέλα Χρονοσειρών και
Τηλεπικοινωνίες
Ο
στόχος είναι η χρονική βελτίωση μετακίνησης οχημάτων κυρίως σε
αστικές πόλεις. Ο ορθολογικότερος
σχεδιασμός των δρομολογίων τους επιτυγχάνεται και αν χρειαστεί υπάρχει και η
δυνατότητα αλλαγής τους.
Ένας απλούστατος
λόγος είναι όταν
τελειώνει κάποιος την δουλειά του μπορεί να πάει το συντομότερο στο σπίτι του
για να έχει περισσότερο ελεύθερο χρόνο.
Όμως υπάρχουν πολλοί περισσότεροι λόγοι και μάλιστα σημαντικότατοι όπως η οργάνωση του δικτύου
διανομής κάποιας εταιρείας. Σ’ αυτές τις
περιπτώσεις, πρέπει να μεταφερθούν προϊόντα και να παραδοθούν σε δεκάδες ν- ή
και εκατοντάδες - αποδέκτες. Αν
συμβουλευτούμε ένα απλό χάρτη, το πιθανότερο είναι να σπαταλήσουμε το
λειτουργικό χρόνο του οχήματος και του οδηγού, δηλαδή να κάνουμε πολυέξοδα
λάθη.
Ο συνδυασμός που προαναφέραμε παρέχει
3 βασικές κατευθύνσεις:
Ø
Τον βέλτιστο
σχεδιασμό και λειτουργία του δικτύου διανομής συνεπώς και της διοίκησης του στόλου
των οχημάτων (άρα μειωμένα έξοδα).
Ø
Την παρακολούθηση αλλά και φύλαξη των οχημάτων.
Την υποστήριξη αποφάσεων των marketing
plan και business plan – βελτίωση στην χωροθέτηση των σημείων δραστηριότητας αλλά και
δημιουργία νέων παραγωγικών δραστηριοτήτων.
Στην Θεσσαλονίκη έχει εγκατασταθεί ένας σταθμός ελέγχου και πλοήγησης (navigation) οχημάτων αλλά και μια μονάδα παροχής αναλύσεων βέλτιστης χωροθέτησης επιχειρηματικών δραστηριοτήτων.
Οι βασικές ομάδες δυνατοτήτων που προσφέρονται
είναι:
Ø Σχεδιασμός βέλτιστου δρομολογίου διανομής
προϊόντων με την συνεργασία των GIS και GPS.
Η βελτίωση του χρόνου διανομής (π.χ. courier) ή διαδρομής (π.χ.
ασθενοφόρου) είναι ουσιαστική και κερδοφόρα.
Χρησιμοποιείται κυρίως από ασθενοφόρα, περιπολικά και αυτοκίνητα
εταιριών security, εταιριών courier, ραδιοταξί, κλπ
Ø
Καθοδήγηση (πλοήγηση) των
οχημάτων της επιχείρησης με βάση τη βελτιστοποίηση (ελαχιστοποίηση) του «κόστους» διαδρομής. Η συγκεκριμένη υπηρεσία παρέχεται και σε πραγματικό χρόνο (real time) και με ακρίβεια
1 – 5 μέτρα, δυνατότητα πολύ σημαντική για την εύρεση του συντομότερου
δρομολογίου, οποιαδήποτε στιγμή ζητηθεί και ενώ είναι
σε εξέλιξη η διανομή.
Ø Συνεχής (σε
πραγματικό χρόνο) παρακολούθηση των οχημάτων και φορτίων (κυρίως
πολύτιμου φορτίου ή επικίνδυνου φορτίου) μιας εταιρείας καθώς και φύλαξη από κλοπή των οχημάτων με παράλληλη
παρακολούθηση της ύποπτης κίνησης (εντόπιση του κλεμμένου οχήματος).
Ø Σχεδιασμός
βέλτιστης χωροθέτησης σημείων δραστηριοποίησης (σημεία
πώλησης – παραγωγής), με βάση το κόστος προσέγγισης των πελατών, των
προμηθευτών και των πρώτων υλών. Αυτό
επιτυγχάνεται χάρη του VECON. Το
σύστημα παράγει δικά του χωρικά και κυκλοφοριακά δεδομένα σε κάποιο «νέο» σημείο πώλησης ή
«νέας» παραγωγικής μονάδας. Τέτοια
δεδομένα είναι:
ü Οι δυνατότητες
της αγοράς (προσέγγιση πελατών) στους υπό
εξέταση χώρους.
ü Ο χρόνος προσέγγισης πρώτων υλών και άλλων
εισροών.
ü Ο χρόνος προσέγγισης του ανθρώπινου
δυναμικού (εργαζόμενοι).
Οι παραπάνω τρεις ομάδες
στοιχείων, ξεχωριστά αλλά και στο σύνολό τους, μπορούν να καταγραφούν, να επεξεργάζονται και να παρουσιάζουν με τη βοήθεια
του συστήματος VECON.
Για να επιτευχθεί αυτό πρέπει να γίνουν μια σειρά από ενέργειες που αναφέρονται
παρακάτω:
1.
Προσδιορισμός της θέσης του οχήματος που κάνει τις παραδόσεις.
2.
Προσδιορισμός των θέσεων παράδοσης.
3.
Εύρεση της βέλτιστης σειράς διανομής – παράδοσης
των πακέτων με βάση τους χρόνους διαδρομής.
Εύρεση της ελάχιστης διαδρομής για την
παράδοση με βάση τους χρόνους διαδρομής.
Η δυνατότητα αυτή επιτυγχάνεται online αλλά και
επιδέχεται αλλαγή μόλις προκύψουν νέα στοιχεία (νέες στάσεις, ενδιάμεση
προσωρινή στάθμευση κλπ).
…..για
ασφαλή πλεύση πλοίων με αυτόματη πλοήγηση……
Για τα πλοία:
Εφαρμόστηκε στην Νορβηγία το χειμώνα του 2002-2003
σε περιοχή με μεγάλη κίνηση πλοίων. Το
αποτέλεσμα ήταν θετικό.
για ασφαλή οδήγηση αεροσκαφών με
αυτόματη πλοήγηση……
Για τα αεροπλάνα:
Και στα αεροπλάνα έχει εφαρμοστεί η αυτόματη πλοήγηση με
επιτυχία. Εδώ βλέπουμε την πορεία
ταξιδίου του αεροσκάφους σε ηλεκτρονικό χάρτη αλλά και το GPS control στο πιλοτήριο.
…..για
ασφαλή οδήγηση τρένων με αυτόματη πλοήγηση……
Για τα τρένα:

Ύστερα εφαρμόστηκε και στα τρένα.
Και πάλι το αποτέλεσμα είναι θετικό.
Πολύ μικρή παρέλκυση σημειώθηκε σε κάποια τούνελ που όμως δεν θεωρήθηκε
σημαντική.
 Πραγματική Διαδρομή
Πραγματική Διαδρομή
Στίγμα του ESTB
…άλλη
μια πολύτιμη χρήση είναι για την ορειβασία……
Η χρήση του GPS είναι πολύτιμη και
πολύπλευρη. Μια ουσιαστική από αυτές
είναι η συλλογική προσπάθεια δημιουργίας ενός "Aρχείου Oρεινών Διαδρομών για
GPS". Σύμφωνα με καταγραφή φορητού GPS, το
αρχείο αυτό περιγράφει διαδρομές (tracks) και σημαντικές τοποθεσίες (waypoints)
στα ελληνικά βουνά. Αυτό είναι πολύ
χρήσιμο στον σύγχρονο ορειβάτη. (http://www.hellaspath.gr)
Ενδεικτικά αναφέρουμε το Βουνό Δίρφη (έχει 3
διαθέσιμες διαδρομές) στις οποίες αναγράφονται αναλυτικά τα βήματα ένα ένα:
1.
Στενή - καταφύγιο
ΕΟΣ Χαλκίδας. Το κλασσικό μονοπάτι ανάβασης από τη Στενή στο καταφύγιο της Δίρφης.
2.
Διάσελο
(Δίρφυς - Ξεροβουνιού) - Καταφύγιο - Κορυφή Δίρφης (1.743 μ).
3.
Φαράγγι Αγάλης
- Κορυφή Δίρφης - Καταφύγιο ΕΟΣ Χαλκίδας.

Βιβλιογραφία
Ø
http://www.colorado.edu/geography/gcraft/notes/gps/gps_f.html
Ø
http://www.gps.gov
Ø
http://www.hellaspath.gr
Ø
http://sidt.gpsworld.com/gpssidt/static/staticHtml.jsp?id=407088
Ø
http://www.colorado.edu/geography/gcraft/notes/gps/gps_f.html
Ø
http://www.hellaspath.gr
Ø
http://www.kathimerini.gr
Ø
http://www.ceid.upatras.gr/faculty/alexiou/ahts/presentations/08_trans_propag.pdf
Ø
GPS
ναυσιπλοΐα περιγραφή ελληνική πτυχιακή
επίσης
Ø
Λακάκης
Κ.: Πλοήγηση Οχημάτων σε Αστική Περιοχή με τη χρήση GPS και Γεωπληροφορικών
Συστημάτων, Διδακτορική Διατριβή, Αριστοτέλειο Πανεπιστήμιο Θεσσαλονίκης, Τμήμα
Πολιτικών Μηχανικών, Θεσσαλονίκη, Ιούνιος 2000.
Ø
Σαββαϊδης
Π.: Automatic Vehicle Location Systems and Their Perspectives of Applications,
Πρακτικά του Πρώτου Ελληνικού Συνεδρίου Οδοποιϊας σελ. 629-638, Λάρισα, 1995.
Ø
Σαββαϊδης
Π., Λακάκης K.: Ανάπτυξη Συστήματος
Πλοήγησης οχημάτων για τη βελτιστοποίηση του χρόνου ανταπόκρισης σε επείγοντα
περιστατικά, εργασία (μετά κρίσεως) στη διημερίδα «Αντιμετώπιση Σεισμικών
Καταστροφών», Θεσσαλονίκη, 3-4 Δεκεμβρίου 1999.
Περιεχόμενα
|
Ιστορικά |
1 |
|
Οι Προγονοί του GPS |
2 |
|
….απλός εντοπισμός…. |
2-3 |
|
….ραδιοεντοπισμός….. |
4 |
|
Γενικά |
5 |
|
….τα πρώτα βήματα….. |
6 |
|
Ιστορική Αναδρομή της
Δορυφορικής Εξέλιξης |
7 |
|
Λειτουργικά Τμήματα |
8 |
|
…..το Διαστημικό Τμήμα…. |
9-10 |
|
….το Επίγειο Τμήμα… |
11 |
|
….το Τμήμα Τελικού Χρήστη…. |
12-13 |
|
Συνεργασία Δορυφόρου – Δέκτη |
14-15 |
|
Ο χρόνος είναι απόσταση |
14-15 |
|
Τρόπος Λειτουργίας του
Συστήματος Πλοήγησης (GPS) |
16-18 |
|
Μέθοδος Προσδιορισμού Θέσης RTK
(Real Time Kinematic) |
19 |
|
Χρονικό της εξέλιξης των GPS |
20 |
|
Χρήση |
21 |
|
…..για ασφαλή οδήγηση αυτοκινήτου με
αυτόματη πλοήγηση…. |
22-23 |
|
Η
Λειτουργία του Δέκτη |
24-25 |
|
….σε συνδυασμό με το σύστημα VeCoN…. |
26-28 |
|
…..για ασφαλή πλεύση πλοίων με αυτόματη
πλοήγηση…… |
29 |
|
…..για ασφαλή οδήγηση αεροσκαφών με
αυτόματη πλοήγηση…… |
29 |
|
…..για ασφαλή οδήγηση τρένων με αυτόματη
πλοήγηση |
30 |
|
….άλλη μια πολύτιμη χρήση είναι για την ορειβασία…… |
31 |
|
Βιβλιογραφία |
32 |